・ヘビ型ロボット(生物模倣ロボット)の研究開発
・レスキューロボット(遠隔操作移動ロボット)の研究開発
・医療ロボット(CT透視ガイド下針穿刺ロボット)の研究開発
ヘビ型ロボット(生物模倣ロボット)の研究開発
生物のしなやかさ(メカニズムや制御)を工学的に再現することは,ロボット工学の大きな目標の一つです.
生物の蛇は,ひものような単純な形状でありながら,あらゆる環境に適応して生息しているので研究対象として大変興味深いです.
その特徴として,大きく以下の3つが挙げられます.
・細くて長い |
またそのメカニズムに基づいて平面内をスムーズに動き回るヘビ型ロボットが開発されてきました.
ところで,ヘビ型ロボットの価値は先の3つの特徴のうち,むしろ1番目と2番目にあります.
・細くて長いので狭いところに入り込めそう |
しかし,これらの機能が実現されれば,危険な災害現場で人間の代わりに生存者を探索するロボットとして,
あるいは複雑な地雷原で地雷撤去作業を行うロボットとして,
ヘビ型ロボットが活躍する時代がくるのかもしれません.
私はそれをめざした研究をしています.
これまでの研究で,3次元空間を運動するヘビ型ロボットのプロトタイプを製作し
その冗長性を生かして多様な形態での移動が可能であることを実証しました.
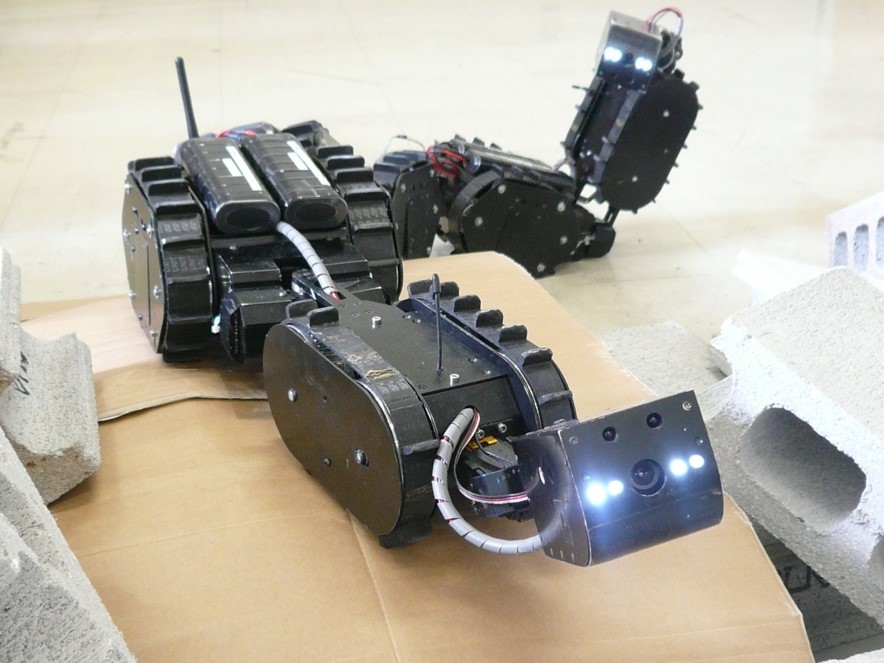
特に最近では,ImPACTタフ・ロボティクス・チャレンジに参画し,ヘビ型ロボットの社会実装に向けた取り組みにも注力をしてきました.
他大学との連携により,先頭カメラのみならず,全周に圧力センサを搭載したり,音響センサで配管内の位置を推定したりする,防塵防水タイプのヘビ型ロボットを開発しています.
螺旋捻転運動というヘビ型ロボットならではの動きを応用し,配管の内部でつっぱったり,あるいは配管の外周にまきついたりして,配管に沿って移動することができます.災害現場で倒壊した家屋内の調査にロボットを利用する実験なども行っています.




・レスキューロボット(遠隔操作移動ロボット)の研究開発
1995年の阪神・淡路大震災を契機として,日本国内でレスキューロボットの研究開発が始まりました.
大規模災害発生時のレスキュー活動においてまず大変なことは要救助者の探索だといわれています.
そうした探索作業において,2次倒壊の可能性がある危険な構造物や,有毒ガスが高い放射線で直接人間が立ち入れない環境を探索する場合,それは生身の人間(生物)にとっては生命の危機に直面する非常に危険な極限環境下の作業であり,これに対して生命でない道具としてのロボットの利用は有効な手段であると言えます.私も災害時にロボット技術・情報技術を活用することを目的として,ヘビ型ロボットに限らず広くレスキューロボットの研究・開発を進めています.
現状の技術では,完全に倒壊してしまった家屋の内部のように極めて複雑で不定な環境を自律で調査するロボットを構築することは非常に困難であるといえます.
そこで研究課題として,遠隔操縦タイプのロボットをベースに,オペレータの探索活動のためのロボット操作を支援するシステムを,ハードウェアの立場とソフトウェアの立場から追求しています.
また,レスキューロボットが実現したとして,普段から利用していないといざというときに使えないシステムになってしまいます.
そのため,日常時と非常時の連続性をもたせたシステム作りが重要となります.
そのようなことも念頭にいれた”使える”システムを作ることが最終目的です.
そこで,まずはラジコン戦車にカメラを1つ搭載したもっとも単純なレスキューロボットを構築して遠隔操縦に対する知見を深め,
その後さらに,車両多連結ヘビ型ロボット「KOHGA」,1軸アームを持つ車輪型レスキューロボット「FUMA」や,大大特プロジェクトで開発されたクローラ型連結レスキューロボット「HELIOSキャリア」の開発に携わってきました.
また,複数ロボット群による探索システムの構築や,発電所での実証実験なども行っています.
また,近年ではいろいろな機器がインターネットに接続されるIoT社会になってきました.
レスキューロボットの遠隔操作においても情報セキュリティの観点に立った設計が必要であり,そのためのロボットのアーキテクチャの設計などにも取り組んでいます.




・医療ロボット(CT透視ガイド下針穿刺ロボット)の研究開発
近年では,医療用に作られた専用の針を刺すだけでがんの検査や治療をする手技が広く行われるようになってきました.従来の手術に比べ,針の通るだけのきずですむので,患者さんへの負担も小さく非常に有用です.この手技では,針を体に刺す(穿刺する)場合に,危険な臓器に針がささらないように,CTで体の中を透視して,針とその周囲の状況を確認しながら穿刺を行う場合があります.これにより,安全で正確な針穿刺を行うことができますが,その一方で,放射線科の医師が日常的にCTのX線で被ばくをするという大きな問題があります.
そこで,医師が被ばくしないように,ロボットを遠隔操作して針穿刺を行うシステムを2012年から開発しています.医師の被ばくがゼロで穿刺を行うロボットという意味でZerobotという名前をつけています.これまでの研究開発により,医師がこのロボットを遠隔操作することで医師の被ばくを防ぎつつも精度よく針をターゲットに対して穿刺できることを実証してきました.はじめは工学部だけで作成した試作機から始まりましたが,県内企業との連携により完成度の高いロボットへと改良が進み,2018年には,岡山大学病院で実際の患者さんに対してこのロボットを使う臨床試験を達成するまでに至っています.
CT透視ガイド下に針穿刺を行うことのできるロボットとして商品化される世界初のロボットの実現をめざした活動を継続してすすめています.



